


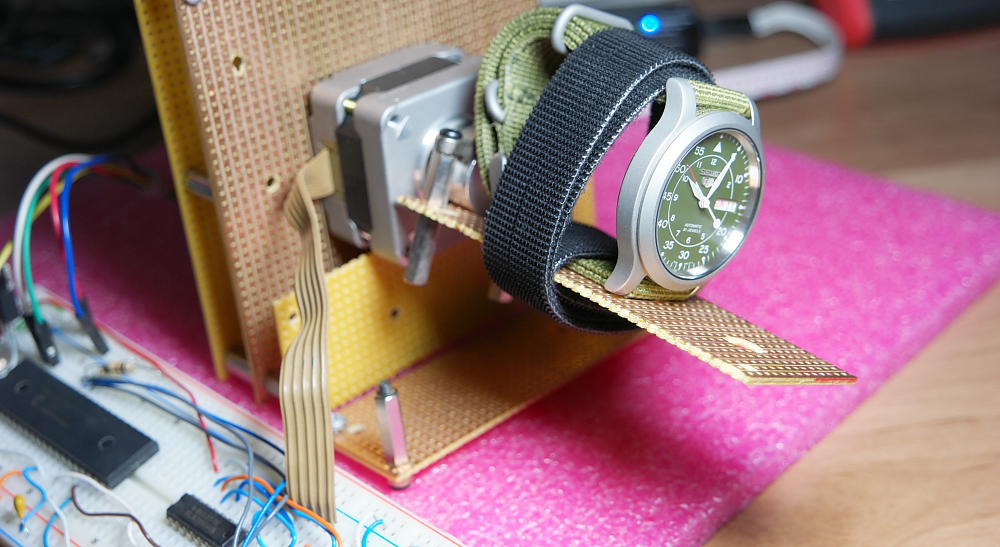
In this post I’ll show how to build a basic kinetic watch winder using PIC microcontroller and stepper motor. Kinetic watches do not require changing the battery as frequently as in quartz watch however despite their many advantages they have a weak spot. If you don’t wear the watch for a few days it will discharge and stop operating. According to manufacturer datasheet you’ll need 50 swings to start the watch and around 350 swings are required to reserve 1 day of power. So if you are not able to make sufficient amount of swings for any reason build this circuit and you’ll be OK. According to my estimate 10 minutes on winder equal 1 day of regular charging (swinging your hand while walking for example). The winder has 3 modes of operation. 1 – Continuous clock wise rotation. 2 – Counter clock wise rotation. 3 – Swing mode which in my opinion can simulate the natural wrist movement much better. I’ve used this mode to test winder operation on my Seiko 5 SNK805

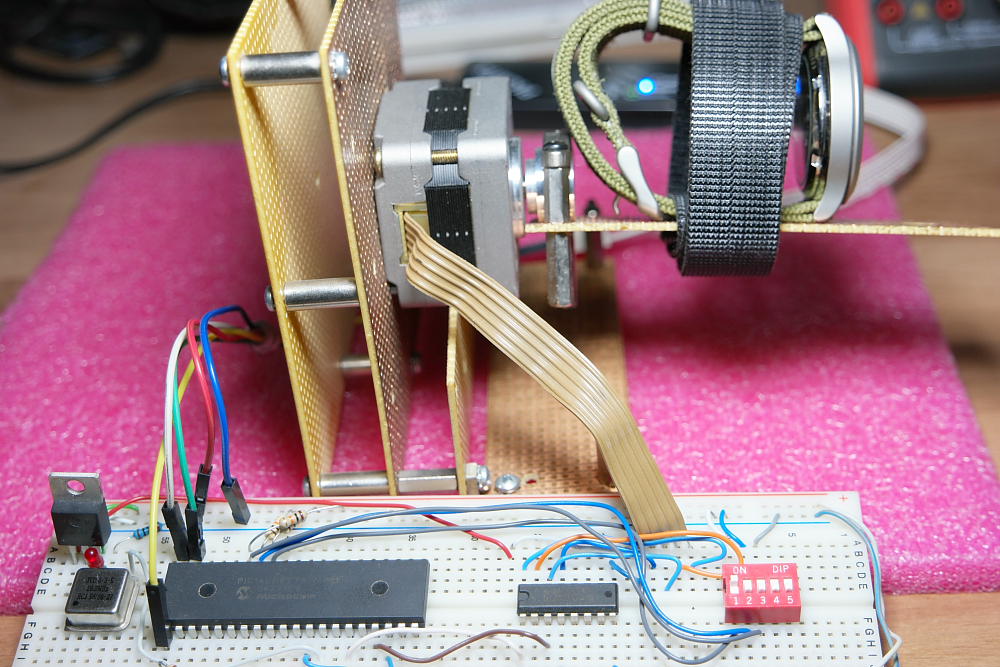
I’ve used an old unipolar stepper motor and prototype boards to build the winder frame. Any similar motors should also work for this project. More information on interfacing the step motor with microcontroller can be found in my earlier post here.


PICkit3 programmer
